砺道智库 2024-02-29 09:00 北京
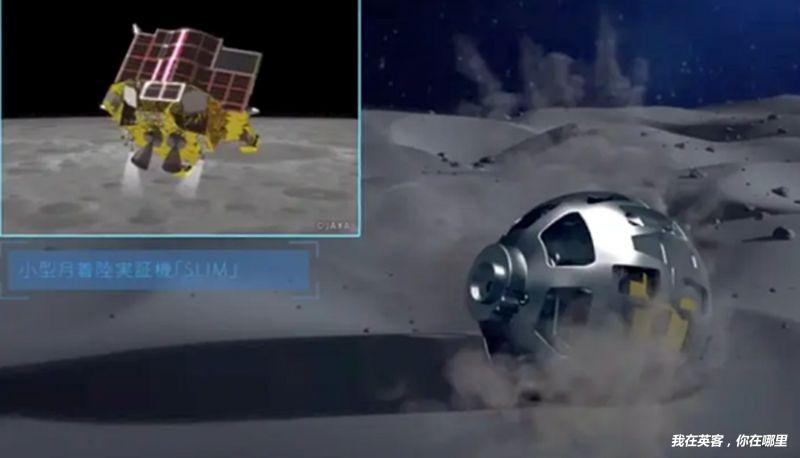
据俄罗斯军事评论网2月28日报道,日本宇宙航空研究开发机构(JAXA)开发的自动星际智能站SLIM于今年1月20日在月球表面软着陆。确实,该模块倒挂在月球上,但除此之外,任务可以认为是成功的。
该平台的任务包括100米的高精度着陆,SLIM成功完成了这一任务。相比之下,阿波罗11号登月舱的着陆精度约为20公里。
除了高精度定点着陆之外,日本的登月任务中还首次使用了其他技术。就在登陆月球之前,两个分别有棒球和篮球大小的自主紧凑型模块LEV-1和LEV-2在SLIM着陆器的五米高度处跳了出来。这些设备顶部配备了可伸缩高分辨率摄像机,记录了SLIM的着陆,并将帧传输到地球。
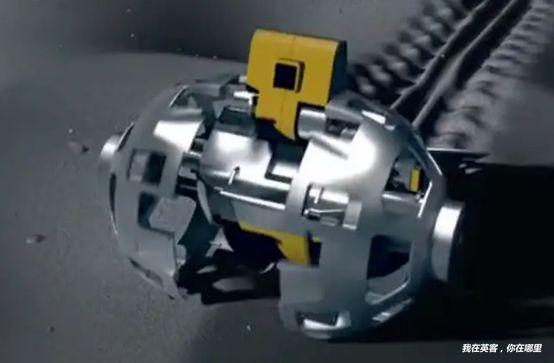
日本Tomy公司制造的紧凑型机器人的一个特点是其在表面上的运动方式。着陆后,每个设备的中心部分都会膨胀,通过两个轮子移动。此外,配备特殊弹簧系统的机器人能够跳跃以跨越各种障碍,例如大石头。根据传输的数据,LEV-1进行了六次跳跃,使其成为第一个能够在外星物体上以这种方式移动的机器人。
此外,LEV-2直径仅为8厘米,是在月球上工作的最小、最轻的装置。同时,机器人之间传输数据测试也取得成功。这是首次在没有地球协助的情况下,使用全自动车辆进行月球探索。目前,LEV-1和LEV-2的电池已经耗尽,任务结束。日本宇宙航空研究开发机构将继续分析探测器发送的数据。
更有趣的是这些机器人的开发和创造历史。这个想法是由日本同志社大学工程学教授渡边公隆(Kimitaka Watanabe)发明和实施的。他在2020年之前一直是日本领先玩具制造商Tomy的员工。他在太空计划中充分利用了玩具变形技术和其他技能。这使得在设计和制造机器人时,实现简单而富有创意的探针设计和构造成为可能。
月球表面覆盖着一层称为风化层的沙子,而且表面有陡峭的斜坡,重力比地球弱。解决这种条件下运动问题的关键模仿新孵化的海龟爬上倾斜沙滩的方式。
它们(乌龟)平躺并爬行。我思考如何用轮子重现这种方法。
——日本全国性报纸《朝日新闻》援引这位教授的话说。
渡边提出的想法是,旋转轮的重心应该稍微偏离中心部分。因此,LEV探测器设计为缓慢而稳定地向前移动,即使在30度的斜坡上也是如此。据《朝日新闻》报道,在两次探测器均成功运行后,渡边表示对结果几乎100%满意。